Machine Design
Columbia University Mechanical Engineering
Fall 2014
Columbia’s Machine Design course includes two main projects. The first project required us to take apart a wind-up toy, analyze its internal mechanism, and model an additional motion to improve the toy. For extra credit, we could implement our change in the toy itself.
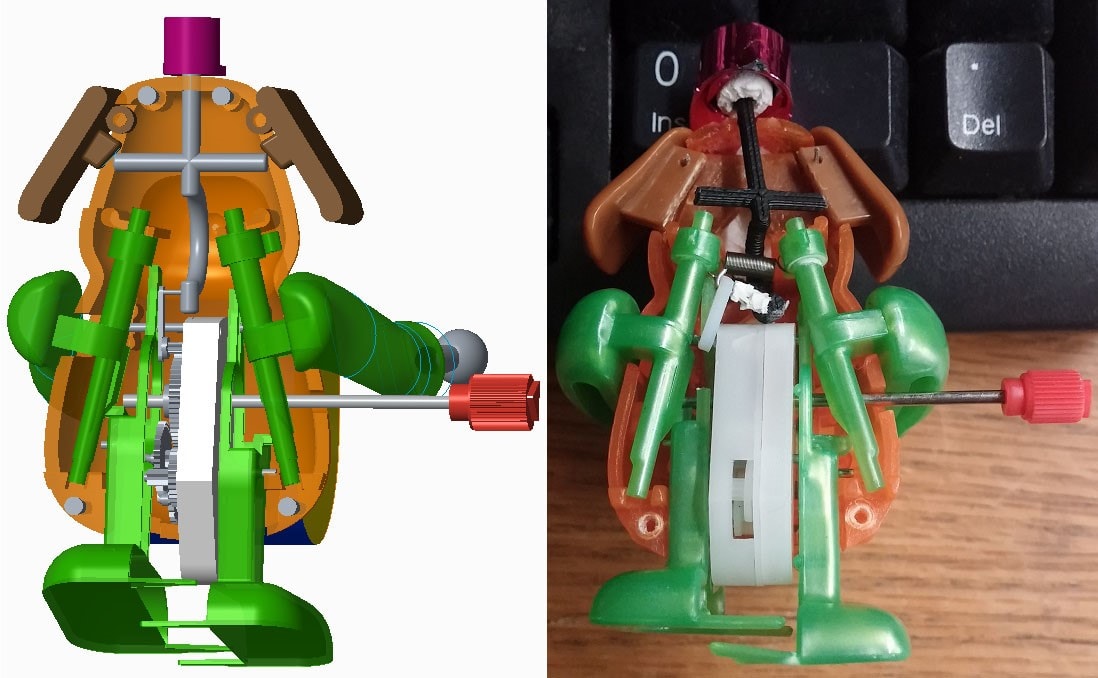
My team was given a marching band drummer dog. We decided to add a cam-follower mechanism that would make the dog’s ears flap and his hat move up and down as he walked. We added a shaft extrusion from one of the gears and a simple two-force member to convert its rotational motion to translation. A uniquely shaped cross bar acted as a cam to push the ears out and moved the dog's hat up and down. Implementing this motion required a combination of precision – we used the biomedical engineering department's 3D printer to produce the extremely small two-force member – and pluck – we used a staple to connect the two-force member to the cross bar and bits of eraser as spacers.

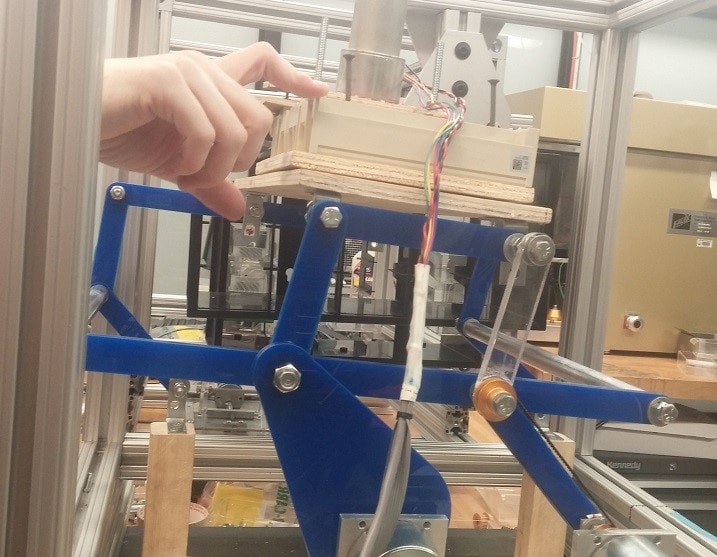
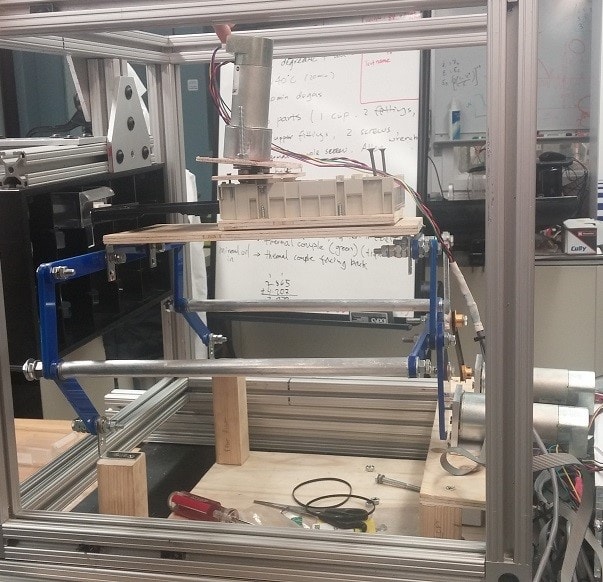
For the final project, we were tasked with building a robot that could remove a loaded drawer from a parts cabinet and insert it in any other space in the cabinet. Once again, my team’s solution drew on a combination of elegance and ingenuity. Motion in the plane parallel to the cabinet was achieved with a pair of stacked four-bar mechanisms. This allowed us to reach any point on the cabinet with minimal rotation of our motors, and a belt and pulley system was used to actuate the second level, leaving the second motor secured on the ground. To remove and replace the drawer, we repurposed a CD drive’s rack and pulley mechanism, linking it to a higher torque motor.
These projects were invaluable to my development as an engineer. I learned theory and analysis tools necessary for creating smart designs. When it came to actually building our designs, a can-do attitude and willingness to adapt and improvise were often more important in getting something to work. I plan to further develop both of these skills as I mature as a designer.