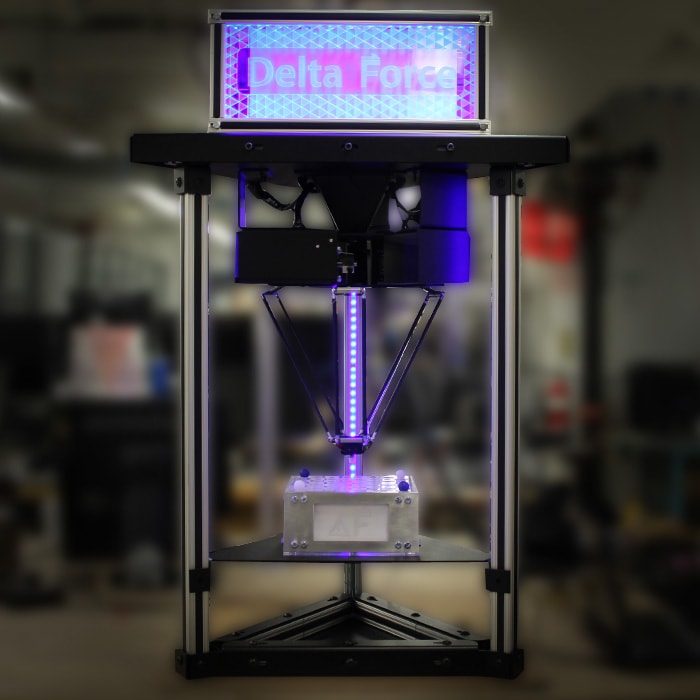
Delta Force
High Speed, Multi-Functional Delta Robot
September 2014 - May 2015
My senior design team was inspired by the speed and precision of delta robots we had seen. We wanted to build a delta robot that could pick-and-place with the best of them, while adding secondary functions such as a music-playing mode and an autonomous chess-playing mode.
As the controls engineer, I was primarily responsible for wiring the electronics, programming the software, and tuning our Delta Tau industrial motion controller, graciously lent to us by a fellow delta robot enthusiast.
Our robot implemented PID control, along with velocity and acceleration feedforward control and a low-pass filter to eliminate high-frequency vibrations. Motion planning was programmed in Delta Tau’s PMAC software, which used a low-level language similar to BASIC and G-code.
To allow users to play against our robot in chess, we passed variables back and forth between a chess AI in Java, a custom Visual C++ GUI, and our motion control program. A user made their move by clicking their desired piece and space on the GUI. Then, the robot moved the user’s piece, followed by making a move of its own. Pick-and-place was achieved with a vacuum attachment at the end effector, and the chess pieces were custom designed and 3D printed.
In the end, Delta Force won 3rd place out of 15 teams at the engineering expo. This project taught me a lot about integrating the electrical, mechanical, and programming aspects of a design. It was also great experience working on a team faced with tight deadlines.